로봇 손이 스마트폰 잡을 수 있도록 돕는 인공 피부 개발
송고시간2020-05-31 12:00

KAIST "사람 피부 구조 본떠 미끄럼 방지"

(대전=연합뉴스) 박주영 기자 = 로봇 손의 작업 수행 능력을 높여줄 인공 피부가 개발됐다.
한국연구재단은 한국과학기술원(KAIST) 박형순·김택수 교수 연구팀이 사람의 피부 구조를 본떠 미끄럼을 방지할 수 있는 로봇 손 용 인공 피부를 개발했다고 31일 밝혔다.
기존 로봇 손 용 피부는 대부분 미용 기능에만 집중돼 있어 작업 능력에는 기여하지 못했다.
연구팀은 실리콘 소재를 이용해 사람의 손바닥 피부처럼 물체가 밀리지 않도록 고정해 줄 수 있는 인공 피부를 개발했다.
겉 피부층, 피하 지방층, 근육층으로 이뤄진 사람의 피부 구조를 본떠 단단한 실리콘 위에 수많은 기공을 가진 다공성 라텍스와 얇은 실리콘 층을 차례로 쌓아 올려 3중 구조를 만들었다.
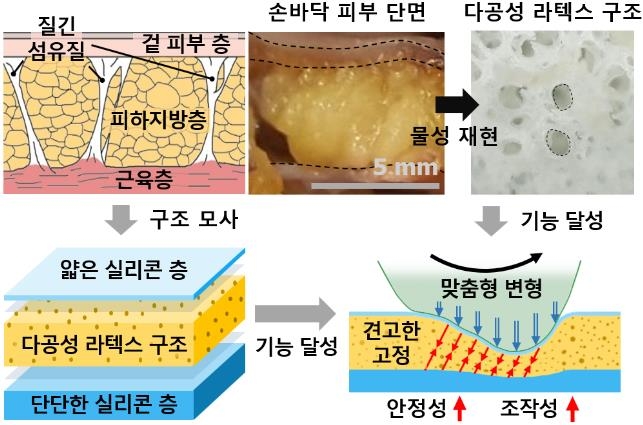
이렇게 만들어진 인공 피부는 기공 덕분에 물체의 형상에 맞게 유연하게 변형되면서도, 기공 사이에 질긴 라텍스 격벽 덕분에 비틀림이나 당김에도 물체를 견고하게 잡을 수 있다.
기존에는 로봇이 스마트폰 잡기 동작을 수행하려면 엄지손가락을 쓰지 않고는 불가능했지만, 연구팀이 개발한 인공 피부를 적용하면 물체를 단단히 고정할 수 있어 네 손가락으로도 잡을 수 있다.
실제 인공 피부를 적용한 로봇 손은 일반 로봇 손에 비해 작업 안정성(물체를 고정할 수 있는 능력)과 조작성(물체를 움직일 수 있는 능력)이 30% 이상 높은 것으로 나타났다.
박형순 교수는 "앞으로 나사처럼 매우 작은 물체나 계란처럼 깨지기 쉬운 물체도 잡을 수 있도록 최적의 피부 구조를 가진 로봇 손을 개발할 계획"이라고 말했다.
이번 연구 결과는 국제 학술지 '어드밴스드 펑셔널 머티리얼즈'(Advanced Functional Materials) 지난 8일 자에 실렸다.
jyoung@yna.co.kr
제보는 카카오톡 okjebo <저작권자(c) 연합뉴스, 무단 전재-재배포, AI 학습 및 활용 금지> 2020/05/31 12:00 송고






![[OK!제보] 머리뼈에 톱날 박혔는데 그냥 봉합…뇌수술 환자 재수술 날벼락](http://img2.yna.co.kr/etc/inner/KR/2024/04/19/AKR20240419033000505_01_i_P2.jpg)


![[영상] 이란 핵시설지역서 '쾅' 폭발음…이스라엘, 이란 본토 보복 타격](http://img2.yna.co.kr/mpic/YH/2024/04/19/MYH20240419015300704_P4.jpg)
![[영상] 무개념 행동 다 찍혔다…새끼곰 억지로 끌어내려 '인증샷' 찰칵!](http://img6.yna.co.kr/mpic/YH/2024/04/19/MYH20240419014600704_P4.jpg)
![[영상] 한미 특전사 공중침투훈련 성료…사상자 발생한 북한과 대비](http://img9.yna.co.kr/mpic/YH/2024/04/19/MYH20240419013800704_P4.jpg)


